
Functional Safety
Safety is the principal requirement of any machine, and must be properly assessed and verified for each component. This is particularly important for machines
such as cranes and hoists that typically operate above and around personnel, where uncontrolled motion could present many hazards. The control system of
these machines is required to behave in a safe manner, even in the presence of faults. This is the principle of Functional Safety.
Often, radio remote controls for use on machines should be assessed for two potential hazards:
STOP: The machine must STOP when commanded from the remote control, or there is a loss of the communication link.
UMFS: (Unexpected motion from standstill). The control system must not initiate motion not commanded by the operator.
Many of our emote control systems are assessed for safety performance against both of these potential hazards, and they are detailed for each model.



AS4024 is one of a family of
Standards regarding Functional
Safety. For more information on
this, and on how Functional Safety
is achieved in our radio controls,
download the white paper.


ISO 13849-1
ISO 13849-1 is an international standard for the Safety of Machinery addressing the General Principles for Design of Safety Related Parts of Control Systems. In Dec
2011, this standard replaced EN954-1 in Europe - EN954-1 was in place from 1996, and the basis of AS4024-1501 and the definition of Safety Categories.
One of the main goals when upgrading the standard were to apply a more realistic, probability-based approach to safety analysis. This is different to EN954 where all
failures are considered equally likely. ISO13849 uses several other parameters besides the Safety Category:
MTTFd - Mean time to Dangerous Failure
DC - Diagnostic Coverage
CCF - Common Cause Failure
Compare to older standards, ISO 13849-1 also directly addresses the use of programmable electronic systems in safety circuits, and defines the processes required for
documentation and validation of safety system designs.
ISO13849 uses a risk matrix very similar to that above for AS4024, but defines the required safety level as a Performance Level (PL) between PLa (the lowest level) and
PLe (the highest). These Performance Levels define the probability of dangerous failures per hour.
Australian Standard AS61508
Drawn from the IEC standard of the same number, AS61508 addresses the Functional Safety of Electrical/Electronic/Programmable Electronic Safety-Related Systems.
It is designed to apply to all industries, not just the Machinery sector.
Many of the goals and approaches are similar to those of ISO13849-1, but with differences in calculations and terminology. AS61508 defines Safety Integrity Levels from
SIL1 (the lowest) to SIL4 (the highest).
Australian Standard AS4024.1501 - 2006
This standard describes the safety requirements, and provides guidance on principles for the design of safety-related parts of control systems, including
programmable and electronic systems. It applies to all safety-related parts of control systems, regardless of the type of energy used (e.g. electrical, hydraulic,
pneumatic, mechanical) and applies to all machinery.
AS4024.1501 defines different categories of fault-resistance by describing the behaviour of the safety function under fault conditions, and whether this is to be
achieved by structural arrangements of the parts, or by their reliability. It is important to note that truly fail-safe behaviour requires a structure that is redundant
and monitored, not simply “reliable”.
The categories are defined as follows - note that the 'safety function' is dependant on the potential hazard being examined - our radio controls are assessed for
two distinct safety functions - STOP and UMFS as described above.
Category 2: The occurrence of a fault may lead to the loss of the safety function between the checking intervals. The fault is detected by the check.
Category 3: When the single fault occurs, the safety function is always performed. Some, but not all faults, will be detected. An accumulation of undetected faults
may lead to the loss of the safety function.
Category 4: When faults occur, the safety function is always performed. The faults will be detected in time to prevent the loss of the safety function.
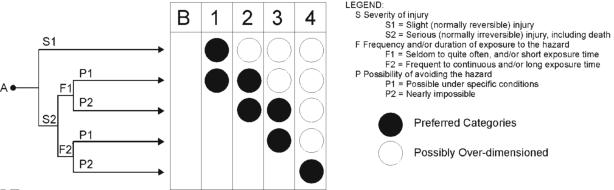
AS4024 also provides guidance on the selection of an appropriate category for a control system, based on three criteria:
- Severity of a potential injury
- Frequency of exposure
- Possibility of avoidance














Functional Safety
Safety is the principal requirement of any machine, and must be properly assessed and
verified for each component. This is particularly important for machines such as cranes and
hoists that typically operate above and around personnel, where uncontrolled motion could
present many hazards. The control system of these machines is required to behave in a
safe manner, even in the presence of faults. This is the principle of Functional Safety.
Often, radio remote controls for use on machines should be assessed for two potential
hazards:
STOP: The machine must STOP when commanded from the remote control, or
there is a loss of the communication link.
UMFS: (Unexpected motion from standstill). The control system must not initiate
motion not commanded by the operator.
Many of our emote control systems are assessed for safety performance against both of
these potential hazards, and they are detailed for each model.


AS4024 is one of a family of
Standards regarding Functional
Safety. For more information on
this, and on how Functional Safety
is achieved in our radio controls,
download the white paper.
Australian Standard AS4024.1501 - 2006
This standard describes the safety requirements, and provides guidance on principles for
the design of safety-related parts of control systems, including programmable and
electronic systems. It applies to all safety-related parts of control systems, regardless of
the type of energy used (e.g. electrical, hydraulic, pneumatic, mechanical) and applies to
all machinery.
AS4024.1501 defines different categories of fault-resistance by describing the behaviour
of the safety function under fault conditions, and whether this is to be achieved by
structural arrangements of the parts, or by their reliability. It is important to note that truly
fail-safe behaviour requires a structure that is redundant and monitored, not simply
“reliable”.
The categories are defined as follows - note that the 'safety function' is dependant on the
potential hazard being examined - our radio controls are assessed for two distinct safety
functions - STOP and UMFS as described above.
Category 2: The occurrence of a fault may lead to the loss of the safety function between
the checking intervals. The fault is detected by the check.
Category 3: When the single fault occurs, the safety function is always performed. Some,
but not all faults, will be detected. An accumulation of undetected faults may lead to the
loss of the safety function.
Category 4: When faults occur, the safety function is always performed. The faults will be
detected in time to prevent the loss of the safety function.
AS4024 also provides guidance on the selection of an appropriate category for a control
system, based on three criteria:
- Severity of a potential injury
- Frequency of exposure
- Possibility of avoidance
